引 言
单片机的应用越来越广泛,而实际应用中对单片机的要求也越来越高。人们总是希望单片机成本尽可能的低,功耗尽可能的低,处理能力又要尽可能的强。这三者是相互矛盾的。
在设计具体产品前,一般是根据成本和估计的处理能力,先选中一款单片机,接下来的软件工作就是利用各种技巧,让单片机能够应付多项任务和多个进程而不发生冲突。使用实时操作系统可以很容易地避免这些冲突,但实时操作系统因程序代码过大常让人不敢问津。
对于不使用实时操作系统的前后台模式的程序,解决时间冲突或任务冲突的方式有很多,常用的有:任务的时间片穿插、信号量或标志位的使用、数据缓冲等等。数据缓冲方式一般有硬件上的F/F缓冲和软件上的环形缓冲两种方式。软件环形缓冲器按实际需要,又可做成单向或双向两种操作方式。环形缓冲的方式非常适合高频率发生事件的处理。
1 环形缓冲器的操作
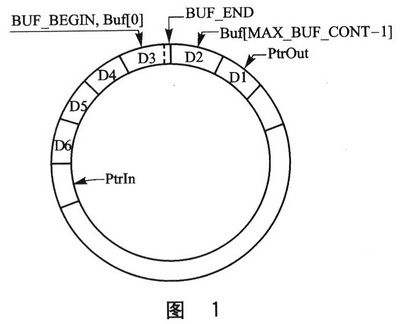
软件环形缓冲器,因为要通过定义数组在内存中开辟数据空间,所以也常称之为“环形缓冲区”。还要定义两个指针:一个数据写入指针PtrIn,用来指向下一次数据写入的地址;另一个是数据读出指针PtrOut,指向下一次读出数据的地址,如图1所示。
数据队列中若没有必须紧急处理的事件,环形缓冲器就只考虑单向操作。
1.1 环形缓冲器的单向操作
所谓“单向操作”,是指环形缓冲器中的数据总是从前面读出,在最后追加。创建缓冲器时,写入指针PtrIn和读出指针PtrOut都初始化到缓冲器的起点BUF_BE-GIN,即数组的第一个地址空间。写入数据后,两指针不再指向同一地址。随着数据的不断写入,写入指针可能会追上读出指针,两个指针再次指向同一地址。两指针指向同一地址时,如何判断缓冲区是满还是空呢?有两个常用的方法:一个方法是不让写入指针追上读出指针。当写入指针追上读出指针时,让写入指针再后退一个地址,先写入的数据也就无效了。显然,这样缓冲器中实际可使用的最大空间比定义的空间要少一个。当缓冲空间的数据是多字节的结构变量时,这个方法会浪费太多空间。另一个方法是增加一个缓冲区满标志变量,此变量若为真,表示两指针相同时,缓冲器数据是满的,否则缓冲器为空。还有一个不太常用的方法,是利用数据是否有效的办法,详见本文第2部分。
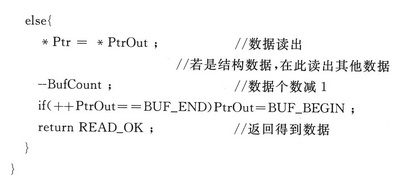
读出指针是可以追上写入指针的。这时缓冲区中数据被读空。下面以16个字空间为例给出操作程序:
开辟空间

1.2 环形缓冲器的双向操作
如果环形缓冲器中有必须优先处理的数据,就要把这样的数据写到缓冲器的开头,即让读出指针PtrOut后退一个空间,把数据写入。这也叫“后入先出”数据操作。前面提到的写入方式又叫先入先出数据操作。下面再给出后入先出的写入程序:
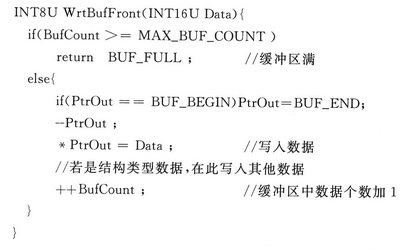
一个环形缓冲器,有了以上这3段操作程序,就成了可以双向操作的环形缓冲器。
2 环形缓冲在二维步进电机控制中的应用
二维数控机床有X方向和Y方向两个步进电机,单片机要控制这两个步进电机共同携带的刀具走出预定的曲线,有以下4项任务:
①计算出下一步,是仅X方向(或仅Y方向)的步进电机走一步,还是X、Y方向的步进电机同时走一步。
②控制两个步进电机尽量以恒转矩加减速,防止失步。
③随时接收来自键盘的动作指令。
④在图形LCD上显示X和Y方向路线图。
两个步进电机以最高速度运转时,都是333μs走一步,实时性又很强,可采用两个环形缓冲器,来解决时间矛盾:一个是有16个字节空间的环形缓冲器,来暂存键盘发来的键码,因为有紧急停止按键功能,所以双向操作;另一个是驱动步进电机的数据,用一个有16个空间的环形缓冲器,单向操作。主程序中计算步进电机相位、一步时间和走线方向,写入环形缓冲器。定时中断程序中读出缓冲器,输出数据到端口,并重置定时器。
启动步进电机前,首先填满缓冲器,再启动第一步。启动步进电机后,程序流程如图2所示。
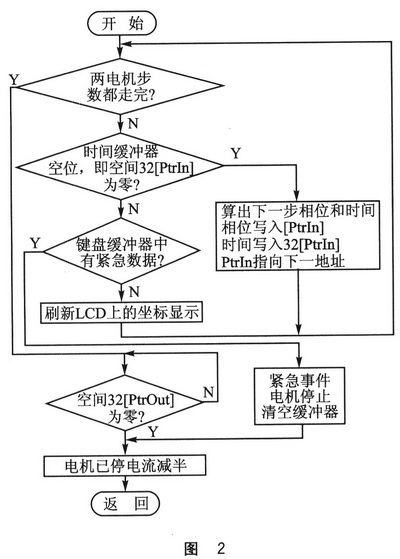
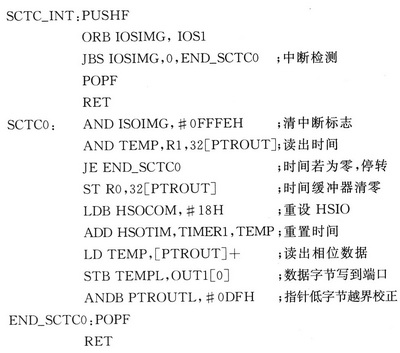
驱动步进电机除了需要相位数据外,还要每一步的定时时间。缓冲器中的数据格式应为结构类型。为便于单指令操作,没有采用结构类型数据,而是用了地址相差32个字节的两个环形缓冲器,这样可以用一对指针进行同步操作。若输出指针PtrOut指向相位缓冲器中某一相位输出数据,则地址PtrOut+32就指向时间缓冲器中步进电机这一步所需要的时间。
步进电机正常运转时,每步时间不能为O,以此判断缓冲器内数据是否有效,省去了缓冲器满变量。同时相位缓冲器的16个字数据,定位在二进制(XXXX XXXXXX00 0000B)到(XXXX XXXX XX01 1111B)的字节空间,地址越界的处理变成了简单地把位5清零。这些方法都加快了缓冲器的操作。
采用带HSIO功能的80C196系列单片机,把HSIO做成软件定时器工作模式。使用16 MHz的晶振时,汇编中断程序的执行时间不到10μs。
结 语
环形缓冲器把数据集中处理,这样就把多个短的时间段组织成了一个较长的时间段。在本例中,步进电机以最高速度运转时,把16个缓冲空间填满,就把333μs汇集成了5 ms多的一个时间段。在这段时间里环形缓冲器不会被读空,所以这段时间主程序不必过问步进电机,可以去处理其他任务,只要在不超过5 ms的时间里,回头再填满缓冲器,就丝毫不影响步进电机的流畅运转。增加环形缓冲器空间的个数,可以得到更长的时间段。这种方式还可应用于变频调速的数据输出、键盘码缓冲,以及串口的、高速连续收发的程序中。开发工作都有很大的借鉴作用。
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。
